

Mathematics, 25.01.2022 18:00, iris7324
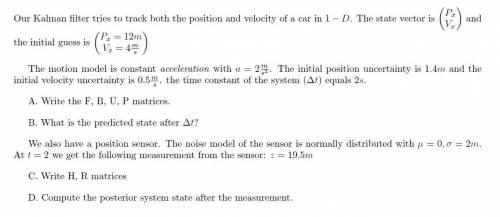
Our Kalman filter tries to track both the position and velocity of a car in 1 −D. The state vector is
Px
Vx
and
the initial guess is
Px = 12m
Vx = 4m
s
The motion model is constant acceleration with a = 2m
s2 . The initial position uncertainty is 1.4m and the
initial velocity uncertainty is 0.5m
s . the time constant of the system (Δt) equals 2s.
A. Write the F, B, U, P matrices.
B. What is the predicted state after Δt?
We also have a position sensor. The noise model of the sensor is normally distributed with μ = 0, σ = 2m.
At t = 2 we get the following measurement from the sensor: z = 19.5m
C. Write H, R matrices
D. Compute the posterior system state after the measurement.
2

Answers: 3
Other questions on the subject: Mathematics
Mathematics, 21.06.2019 16:00, gavianacandelar8522
Enter the number of complex zeros for the polynomial function in the box. f(x) = x+ + 5x² +6
Answers: 2
Mathematics, 21.06.2019 18:30, yeet6942000
Complex numbers multiply √-4 * √-25 and show all intermediate steps. alternative notation is sqrt(-4) * sqrt(-25).
Answers: 1
Mathematics, 21.06.2019 19:30, 22emilyl530
Bobby bought 1.12 pounds of turkey at a cost of 2.50 per pound. carla bought 1.4 pounds of turkey at a cost of 2.20 per pound. who spent more and by much?
Answers: 2
Do you know the correct answer?
Our Kalman filter tries to track both the position and velocity of a car in 1 −D. The state vector i...
Questions in other subjects:

Social Studies, 21.11.2020 23:10


Biology, 21.11.2020 23:10

Spanish, 21.11.2020 23:10
English, 21.11.2020 23:10

Arts, 21.11.2020 23:10



